FANUC A16B-3200-0612 | 6-एक्सिस सर्वो ड्राइव एम्पलीफायर पीसीबी — A16B-3200 सीरीज, रोबोट / सीएनसी सर्वो कंट्रोल बोर्ड, औद्योगिक स्पेयर पार्ट, जापान मूल
अवलोकन
FANUC A16B-3200-0612FANUC की A16B-3200 सीरीज के भीतर एक सर्वो ड्राइव एम्पलीफायर पीसीबी है — जो 1990 के दशक के अंत से 2010 के दशक तक FANUC के सीएनसी और रोबोट कंट्रोल प्लेटफॉर्म को कवर करने वाले प्रिंटेड सर्किट बोर्ड का परिवार है।A16B-3200 सीरीज व्यापक है: इसमें कई FANUC उत्पाद पीढ़ियों में मुख्य सीपीयू बोर्ड, रोबोट मेन बोर्ड, सर्वो ड्राइव कंट्रोल पीसीबी और संचार इंटरफ़ेस बोर्ड शामिल हैं।
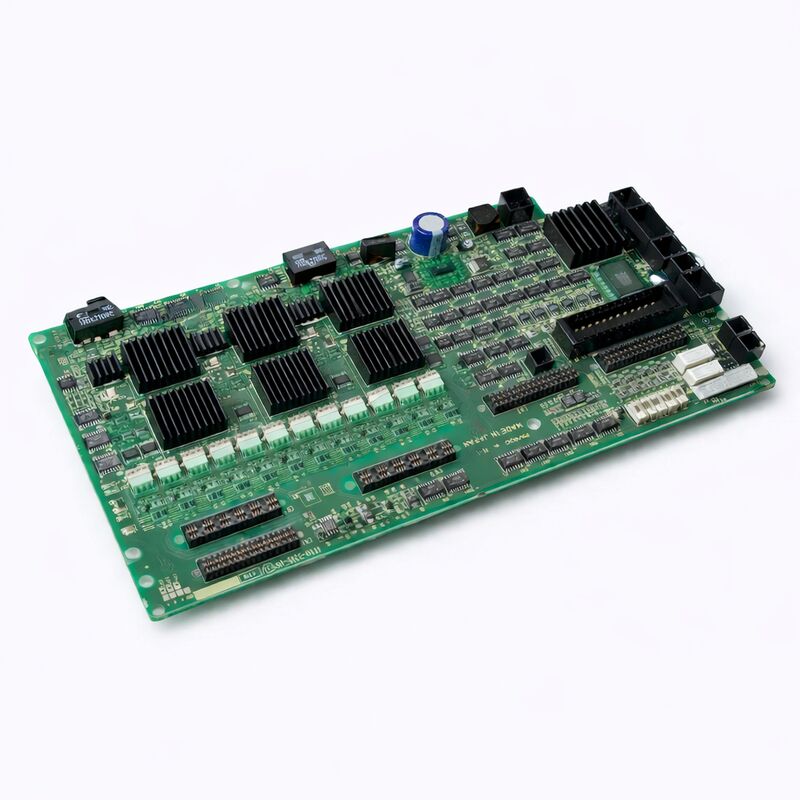
-0612 वेरिएंट की 6-एक्सिस सर्वो ड्राइव एम्पलीफायर पीसीबी के रूप में पहचान इसकी भौतिक संरचना से पुष्टि होती है — हीटसिंक असेंबली के साथ कई उच्च-शक्ति आईसी पैकेज बोर्ड पर व्यवस्थित होते हैं, प्रत्येक एक सर्वो एक्सिस के आईजीबीटी को गेट ड्राइव सिग्नल के लिए जिम्मेदार होता है।
एक FANUC रोबोट या मल्टी-एक्सिस सीएनसी ड्राइव कैबिनेट में, सर्वो कंट्रोल इलेक्ट्रॉनिक्स सीएनसी/रोबोट कंट्रोलर के कमांड आउटपुट और भौतिक आईजीबीटी पावर स्टेज के बीच स्थित होते हैं जो सर्वो मोटर्स को करंट पहुंचाता है।
A16B-3200-0612 इस महत्वपूर्ण मध्यवर्ती स्थिति पर कब्जा करता है — यह रोबोट या सीएनसी सीपीयू से एक्सिस पोजीशन और वेलोसिटी कमांड प्राप्त करता है, रियल-टाइम सर्वो कंट्रोल लूप गणनाओं को निष्पादित करता है, और पावर सेमीकंडक्टर को चलाने वाले पीडब्ल्यूएम सिग्नल उत्पन्न करता है।
एक कार्यात्मक सर्वो कंट्रोल पीसीबी के बिना, मोटर, मैकेनिकल ड्राइव ट्रेन, या बिजली की आपूर्ति के स्वास्थ्य की परवाह किए बिना कोई भी एक्सिस गति संभव नहीं है।
जिस R-30iA मेट कंट्रोलर में A16B-3200-0612 की पहचान की गई थी, वह FANUC का कॉम्पैक्ट रोबोट कंट्रोलर है जिसे छोटे रोबोट के लिए डिज़ाइन किया गया है — R-2000iA मेट, M-10iA, M-20iA, और संबंधित कॉम्पैक्ट रोबोट सीरीज जो आमतौर पर असेंबली, सामग्री हैंडलिंग, वेल्डिंग और पिक-एंड-प्लेस अनुप्रयोगों में पाई जाती हैं।
R-30iA मेट का कॉम्पैक्ट फॉर्म फैक्टर बिजली की आपूर्ति, एम्पलीफायर और कंट्रोल इलेक्ट्रॉनिक्स को एक सघन रूप से पैक किए गए कैबिनेट में एकीकृत करता है, जिससे बोर्ड-स्तरीय सेवाक्षमता को पूर्ण कंट्रोलर प्रतिस्थापन के बजाय पसंदीदा रखरखाव दृष्टिकोण बनाया जाता है।
मुख्य विनिर्देश
पैरामीटर
| मान |
श्रृंखला |
| A16B-3200 |
कार्य |
| 6-एक्सिस सर्वो ड्राइव एम्पलीफायर पीसीबी |
विन्यास |
| हीटसिंक असेंबली के साथ मल्टी-आईसी |
ज्ञात अनुप्रयोग |
| R-30iA मेट रोबोट कंट्रोलर |
उत्पत्ति |
| जापान |
स्थिति |
| बंद किया गया स्पेयर |
छह-एक्सिस सर्वो नियंत्रण — बोर्ड के पीछे की वास्तुकला |
एक 6-एक्सिस सर्वो नियंत्रण पीसीबी छह सर्वो मोटर एक्सिस के एक साथ, स्वतंत्र नियंत्रण को संभालता है — एक विशिष्ट औद्योगिक रोबोट आर्म (J1 से J6) के छह जोड़।
प्रत्येक एक्सिस को पीडब्ल्यूएम कैरियर आवृत्ति (आमतौर पर 4–8kHz) पर निष्पादित होने वाले अपने स्वयं के नियंत्रण लूप की आवश्यकता होती है: संयुक्त एनकोडर स्थिति को पढ़ना, इसे कमांडेड स्थिति से तुलना करना, वेग और स्थिति त्रुटि के माध्यम से वर्तमान संदर्भ की गणना करना, और एक्सिस के आईजीबीटी ब्रिज के लिए उपयुक्त पीडब्ल्यूएम ड्यूटी चक्र आउटपुट करना।
सभी छह लूप समानांतर में निष्पादित होते हैं, हर पीडब्ल्यूएम चक्र में, एक दूसरे को बाधित किए बिना।
A16B-3200-0612 पर दिखाई देने वाली हीट सिंकिंग एक साथ छह उच्च-आवृत्ति गेट ड्राइव सर्किट चलाने के थर्मल लोड को दर्शाती है।
गेट ड्राइव आईसी वे आईजीबीटी के गेट चार्ज, गेट ड्राइव वोल्टेज और स्विचिंग आवृत्ति के अनुपात में शक्ति को नष्ट करते हैं।
छह एक्सिस पर 6kHz पीडब्ल्यूएम पर, संयुक्त गेट ड्राइव अपव्यय महत्वपूर्ण है — हीटसिंक यह सुनिश्चित करते हैं कि गेट ड्राइव आईसी अपने अधिकतम जंक्शन तापमान के भीतर रहें, जिससे थर्मल-प्रेरित बहाव को रोका जा सके जो सर्वो प्रदर्शन को खराब कर सकता है या समय से पहले आईसी विफलता का कारण बन सकता है।
एक विफल A16B-3200-0612 की पहचान
जब R-30iA मेट या समान प्रणाली में सर्वो ड्राइव एम्पलीफायर पीसीबी विफल हो जाता है, तो रोबोट कंट्रोलर सर्वो रेडी स्थिति स्थापित नहीं कर पाता है।
पेंडेंट आमतौर पर सर्वो सिस्टम श्रेणी में अलार्म प्रदर्शित करता है — FANUC रोबोट शब्दावली में SRVO-अलार्म कोड — जो एक्सिस-स्तरीय सर्वो संचार या ड्राइव दोषों को इंगित करते हैं।
सामान्य प्रस्तुतियाँ शामिल हैं:
एक साथ कई एक्सिस अलार्म:
क्योंकि A16B-3200-0612 सभी छह एक्सिस को संभालता है, एक बोर्ड विफलता अक्सर केवल एक के बजाय सभी एक्सिस को एक साथ प्रभावित करती है। इसके विपरीत, एक एकल-एक्सिस सर्वो दोष, मोटर, केबल, या एनकोडर समस्या की तुलना में बोर्ड विफलता की अधिक संभावना है।पावर साइकिल के बाद सर्वो रेडी स्थापित नहीं किया जा सकता:
ड्राइव आरंभीकरण अनुक्रम, जिसमें सर्वो एम्पलीफायर बोर्ड अपने बिजली की आपूर्ति और गेट ड्राइवर सर्किट्री की पुष्टि करता है, स्पष्ट बिजली आपूर्ति वोल्टेज के बावजूद बार-बार विफल रहता है।विशिष्ट अलार्म कोड:
कई एक्सिस पर SRVO-047 (सर्वो मोटर वेलोसिटी एरर), या संचार-प्रकार के सर्वो अलार्म, किसी भी यांत्रिक या मोटर दोष की अनुपस्थिति के साथ मिलकर, एम्पलीफायर पीसीबी को दोष स्रोत के रूप में इंगित करते हैं।अक्सर पूछे जाने वाले प्रश्न
Q1: क्या A16B-3200-0612 का उपयोग R-30iA मेट के अलावा अन्य प्रणालियों में किया जा सकता है, और संगतता की पुष्टि कैसे की जाती है?
A16B-3200-0612 की पहचान R-30iA मेट कंट्रोलर में की गई थी, लेकिन A16B-3200 सीरीज कई FANUC प्लेटफॉर्म पर फैली हुई है। किसी विशिष्ट प्रणाली के साथ संगतता के लिए बोर्ड के कनेक्टर लेआउट, स्लॉट आयाम और इंटरफ़ेस प्रोटोकॉल को लक्ष्य प्रणाली के बैकप्लेन और सर्वो ड्राइव आर्किटेक्चर से मिलान करने की आवश्यकता होती है।
R-30iA मेट के अलावा किसी अन्य सिस्टम के लिए ऑर्डर करने से पहले, कंट्रोलर के रखरखाव मैनुअल या स्पेयर पार्ट्स सूची के विरुद्ध भाग संख्या की पुष्टि करें।
असंगत पिनआउट या प्रोटोकॉल वाले बोर्ड को फिट करने से बोर्ड और सिस्टम दोनों को नुकसान हो सकता है।
Q2: बोर्ड को एक डीकमीशन मशीन से हटाया गया था और अलग से परीक्षण नहीं किया गया था। जोखिम क्या हैं?
एक डीकमीशन सिस्टम से हटाए गए एक अप्रमाणित बोर्ड एक अज्ञात गुणवत्ता स्तर का प्रतिनिधित्व करता है — यह पूरी तरह कार्यात्मक हो सकता है, या यह उसी घटना से विफल हो सकता है जिसने मशीन को डीकमीशन किया था।
उत्पादन प्रणाली में स्थापित करने से पहले, यदि संभव हो तो बोर्ड का परीक्षण एक संगत परीक्षण रिग पर किया जाना चाहिए, या इस पूरी जागरूकता के साथ स्थापित किया जाना चाहिए कि पहला पावर-अप प्रभावी रूप से एक फील्ड परीक्षण है। उत्पादन रोबोट में एक अप्रमाणित बोर्ड स्थापित करने से पहले एक बैकअप योजना (एक और स्पेयर बोर्ड, या स्टैंडबाय पर एक मरम्मत केंद्र) रखने से डाउनटाइम का जोखिम कम हो जाता है।
Q3: स्थापना से पहले A16B-3200-0612 को सत्यापित करने के लिए किन उपकरणों या परीक्षण रिग की आवश्यकता है?
उचित परीक्षण के लिए एक संगत FANUC रोबोट या सीएनसी कंट्रोलर परीक्षण रिग की आवश्यकता होती है — वही कंट्रोलर प्रकार जिसके लिए बोर्ड डिज़ाइन किया गया है — कार्यात्मक सर्वो एम्पलीफायर बिजली की आपूर्ति, सर्वो मोटर्स का एक सेट (या लोड रेसिस्टर) जुड़ा हुआ, और रोबोट गति कमांड निष्पादित करने की क्षमता के साथ।
FANUC विशेषज्ञ मरम्मत केंद्र बोर्ड-स्तरीय सत्यापन के लिए विशेष रूप से ऐसे परीक्षण रिग बनाए रखते हैं।
एक संगत रिग के बिना, लक्ष्य उत्पादन मशीन पर कार्यात्मक परीक्षण ही एकमात्र विकल्प है, जिसमें यदि प्रतिस्थापन बोर्ड भी खराब है तो विस्तारित डाउनटाइम का जोखिम होता है।
Q4: तीन चिप्स पर हीटसिंक बोर्ड से गायब हैं। क्या इससे कार्यक्षमता प्रभावित होती है?
गेट ड्राइव आईसी पर गायब हीटसिंक संचालन के दौरान थर्मल विफलता के जोखिम को बढ़ाते हैं। हीटसिंक के बिना गेट ड्राइव आईसी कम ड्यूटी चक्र या कम परिवेश तापमान पर विनिर्देश के भीतर चल सकते हैं, लेकिन गर्म कैबिनेट वातावरण में निरंतर उच्च-आवृत्ति संचालन के तहत ज़्यादा गरम हो सकते हैं।
स्थापना से पहले, गायब हीटसिंक को उपयुक्त थर्मल कंपाउंड और समकक्ष हीटसिंक हार्डवेयर से बदला जाना चाहिए।
आईसी पैकेज का आकार और शक्ति अपव्यय सही हीटसिंक विनिर्देश निर्धारित करता है — थर्मल प्रतिरोध आवश्यकताओं के लिए प्रासंगिक आईसी डेटाशीट से परामर्श करें।
Q5: A16B-3200-0612 को बदलने से पहले मूल मशीन से कौन सा बैकअप या प्रलेखन तैयार किया जाना चाहिए?
रोबोट सिस्टम के लिए, बैकअप करें: सभी रोबोट प्रोग्राम (PROG स्क्रीन — ALL.TP बैकअप), सभी सिस्टम पैरामीटर (SYSVAR फ़ाइल), मास्टेरिंग डेटा (संयुक्त एनकोडर संदर्भ स्थिति — बोर्ड प्रतिस्थापन के बाद रोबोट सटीकता के लिए महत्वपूर्ण), और कोई भी I/O कॉन्फ़िगरेशन डेटा।
सीएनसी सिस्टम के लिए, बैकअप करें: सभी सीएनसी पैरामीटर, पीएमसी लैडर, और पार्ट प्रोग्राम।
सर्वो कंट्रोल पीसीबी स्वयं इस डेटा को संग्रहीत नहीं करता है (यह मशीन डेटा के दृष्टिकोण से स्टेटलेस है), लेकिन प्रतिस्थापन प्रक्रिया के लिए एक सर्वो रीबूट अनुक्रम की आवश्यकता हो सकती है जो कुछ अस्थिर सर्वो स्टेट्स को साफ़ करता है — उत्पादन प्रणाली में किसी भी बोर्ड प्रतिस्थापन को शुरू करने से पहले सभी महत्वपूर्ण डेटा को बाहरी रूप से बैकअप किया जाना चाहिए।

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!