FANUC A20B-2001-0821 | अल्फा सीरीज़ SVM सर्वो कंट्रोल बोर्ड — सीएनसी और रोबोट, जापान मूल
भाग संख्या: A20B-2001-0821
निर्माता: FANUC Corporation (जापान)
उत्पाद प्रकार: सर्वो एम्पलीफायर कंट्रोल बोर्ड (SVM PCB)
बोर्ड सीरीज़: A20B-2001
ड्राइव फ़ैमिली: FANUC अल्फा सीरीज़ सर्वो एम्पलीफायर मॉड्यूल (SVM)
अनुप्रयोग: FANUC सीएनसी और रोबोट सर्वो ड्राइव सिस्टम
अवलोकन
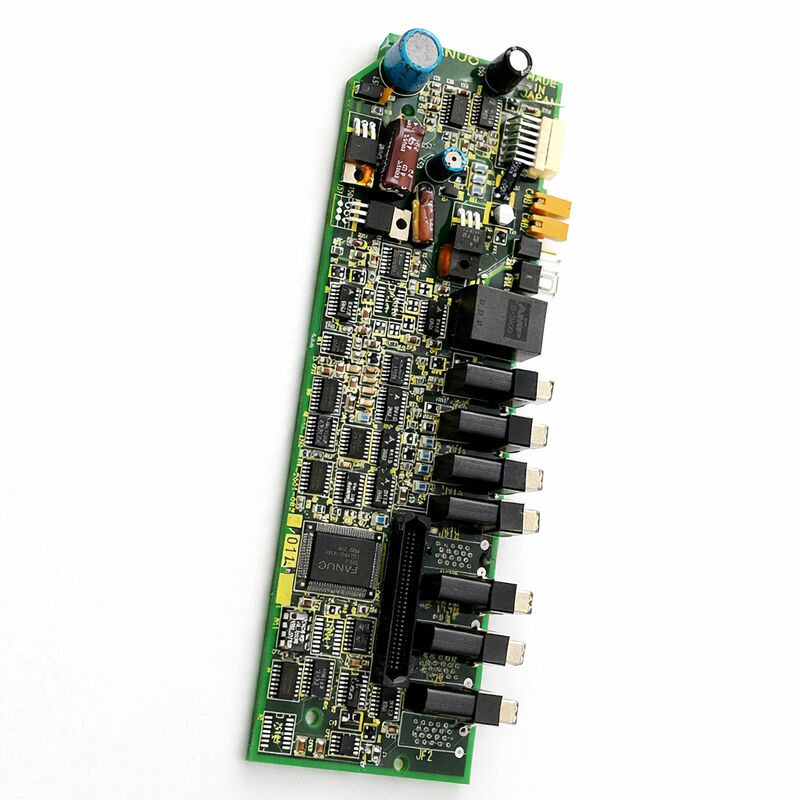
A20B-2001-0821 FANUC की अल्फा सीरीज़ सर्वो एम्पलीफायर मॉड्यूल (SVM) के लिए एक सर्वो एम्पलीफायर कंट्रोल बोर्ड है।
FANUC की मॉड्यूलर अल्फा ड्राइव आर्किटेक्चर में, SVM एम्पलीफायर यूनिट है जो सीधे सर्वो मोटर को पावर देती है — PSM द्वारा आपूर्ति की गई DC बस वोल्टेज लेती है और इसे तीन-चरण चर-आवृत्ति AC में परिवर्तित करती है जो मोटर को चलाती है।
A20B-2001-0821 SVM के भीतर कंट्रोल बोर्ड है: PCB जिसमें सर्वो ड्राइव के वर्तमान लूप, वेग लूप, एन्कोडर फीडबैक इंटरफ़ेस और सीएनसी संचार के लिए प्रसंस्करण इलेक्ट्रॉनिक्स होते हैं।
अल्फा सीरीज़ ड्राइव को FANUC-नियंत्रित मशीन टूल्स और औद्योगिक रोबोट की एक विस्तृत श्रृंखला में तैनात किया गया था।
एक सीएनसी मशीनिंग सेंटर में, प्रत्येक अक्ष मोटर का अपना SVM होता है। एक छह-अक्ष औद्योगिक रोबोट में, प्रत्येक संयुक्त मोटर का अपना SVM होता है या वह पड़ोसी के साथ SVM यूनिट साझा करता है।
इन SVMs में से प्रत्येक में एक कंट्रोल बोर्ड होता है। जब एक सर्वो ड्राइव कंट्रोल बोर्ड विफल हो जाता है, तो वह अक्ष या संयुक्त रुक जाता है — और सही प्रतिस्थापन बोर्ड के साथ, यह फिर से शुरू हो जाता है।
A20B-2001 सीरीज़ विभिन्न ड्राइव वर्तमान रेटिंग और इंटरफ़ेस प्रकारों को कवर करते हुए, कई अल्फा SVM कॉन्फ़िगरेशन के लिए कंट्रोल बोर्ड तक फैली हुई है।
-0821 वेरिएंट इस फ़ैमिली के भीतर अपने विशिष्ट SVM मॉडल और हार्डवेयर संशोधन की सेवा करता है।
बोर्ड जापान में निर्मित है और औद्योगिक सर्वो ड्राइव अनुप्रयोगों की निरंतर-ड्यूटी आवश्यकताओं के लिए डिज़ाइन किया गया है।
मुख्य विनिर्देश
| पैरामीटर |
मान |
| भाग संख्या |
A20B-2001-0821 |
| निर्माता |
FANUC Corporation |
| उत्पाद प्रकार |
सर्वो एम्पलीफायर कंट्रोल बोर्ड |
| बोर्ड सीरीज़ |
A20B-2001 |
| ड्राइव फ़ैमिली |
FANUC अल्फा सीरीज़ SVM |
| अनुप्रयोग |
FANUC सीएनसी और रोबोट सर्वो ड्राइव नियंत्रण |
| उत्पत्ति |
जापान |
| परिचालन तापमान |
0 – 55°C (SVM यूनिट में स्थापित के रूप में) |
| भंडारण तापमान |
–20 – 55°C |
| आर्द्रता |
75% RH अधिकतम (गैर-संक्षेपण) |
| उपलब्ध स्थिति |
नया (अतिरिक्त) / नवीनीकृत / मरम्मत किया हुआ |
SVM कंट्रोल बोर्ड — एक में तीन लूप
सर्वो ड्राइव कंट्रोल बोर्ड एक साथ सर्वो फीडबैक नियंत्रण के सभी तीन स्तरों को निष्पादित करता है। ये लूप एक साथ कैसे काम करते हैं, यह समझने से यह पता चलता है कि एक अच्छी तरह से काम करने वाला सर्वो ड्राइव सटीक रूप से प्रदर्शन क्यों करता है और कंट्रोल बोर्ड खराब होने पर क्या विफल हो जाता है।
वर्तमान लूप नींव है।
यह SVM के वर्तमान सेंसर से मोटर के चरण धाराओं को पढ़ता है, उन्हें वेग नियंत्रक से वर्तमान आदेशों से तुलना करता है, और वास्तविक वर्तमान को आदेशित स्तर पर लाने के लिए IGBT गेट संकेतों को समायोजित करता है। यह लूप दसियों किलोहर्ट्ज़ की दर से चलता है।
बोर्ड पर एक खराब वर्तमान माप सर्किट इस लूप में त्रुटियां पेश करता है, जिससे वर्तमान विकृति होती है जो मोटर शोर, कंपन और गर्मी के रूप में दिखाई देती है।
वेग लूप वर्तमान लूप के ऊपर बैठता है।
यह एन्कोडर फीडबैक पढ़ता है, वास्तविक मोटर वेग की गणना करता है, इसे स्थिति नियंत्रक से आदेशित वेग से तुलना करता है, और वर्तमान आदेश उत्पन्न करता है।
यह लूप हर कुछ सौ माइक्रोसेकंड में अपडेट होता है।
एक खराब एन्कोडर इंटरफ़ेस सर्किट वेग फीडबैक में शोर पैदा करता है, जिससे गति अस्थिरता होती है।
स्थिति लूप शीर्ष पर बैठता है। यह सीएनसी के इंटरपोलेटर से स्थिति लक्ष्य प्राप्त करता है और उन्हें वास्तविक एन्कोडर स्थिति से तुलना करता है।
स्थिति त्रुटि वेग कमांड को चलाती है। यह लूप क्लोजर हर सर्वो चक्र में होता है — आमतौर पर 1 मिलीसेकंड।
मशीन की अक्ष स्थिति की सटीकता अंततः इस कंट्रोल बोर्ड पर सभी तीन लूप कितनी अच्छी तरह निष्पादित होते हैं, इससे निर्धारित होती है।
सीएनसी और रोबोट अनुप्रयोगों में अल्फा SVM
एक सीएनसी मशीन टूल में, अल्फा SVM मॉड्यूल ड्राइव कैबिनेट में PSM के साथ लगे होते हैं। प्रत्येक SVM एक अक्ष को चलाता है। एक 3-अक्ष मशीनिंग सेंटर में, आमतौर पर तीन SVM होते हैं — एक X के लिए, एक Y के लिए, एक Z के लिए — साथ ही एक स्पिंडल एम्पलीफायर मॉड्यूल।
इन SVMs में कंट्रोल बोर्ड FANUC के सीरियल सर्वो बस के माध्यम से सीएनसी के साथ संवाद करते हैं, स्थिति कमांड प्राप्त करते हैं और एन्कोडर स्थिति की रिपोर्ट करते हैं।
एक FANUC औद्योगिक रोबोट कंट्रोलर में, वही SVM आर्किटेक्चर रोबोट के संयुक्त मोटरों को चलाता है।
उदाहरण के लिए, R-J3 कंट्रोलर पीढ़ी ने रोबोट के छह संयुक्त अक्षों के लिए अल्फा SVM का उपयोग किया।
रोबोट कंट्रोलर सीएनसी के समान सीरियल इंटरफ़ेस के माध्यम से इन SVMs के साथ संवाद करता है।
A20B-2001-0821 कंट्रोल बोर्ड दोनों अनुप्रयोग संदर्भों की सेवा करता है क्योंकि हार्डवेयर आर्किटेक्चर सुसंगत है।
यह क्रॉस-एप्लिकेशन संगतता रखरखाव में एक व्यावहारिक लाभ है।
एक सेवानिवृत्त रोबोट से एक कंट्रोल बोर्ड संभावित रूप से सीएनसी मशीन में प्रतिस्थापन के रूप में काम कर सकता है, और इसके विपरीत, यदि बोर्ड का पूरा भाग संख्या ठीक से मेल खाता है।
कंट्रोल बोर्ड दोष की पहचान
एक सर्वो ड्राइव कंट्रोल बोर्ड दोष विशिष्ट लक्षणों का एक पैटर्न उत्पन्न करता है जो इसे अन्य ड्राइव सिस्टम दोषों से अलग करता है।
स्थिति त्रुटियां, वेग अस्थिरता, या असामान्य मोटर शोर जो केवल एक विशिष्ट अक्ष पर दिखाई देता है — जबकि अन्य सभी अक्ष सामान्य रूप से काम करते हैं — उस अक्ष के SVM कंट्रोल बोर्ड या उसके एन्कोडर फीडबैक पथ की ओर इशारा करता है। कंट्रोल बोर्ड की समस्याएं अक्ष-विशिष्ट और सुसंगत होती हैं।
एक ड्राइव जो पावर-ऑन पर अपनी तैयार स्थिति में प्रवेश करने से इनकार करती है, किसी भी गति का आदेश दिए जाने से पहले VRDY (वेग तैयार) अलार्म दिखाती है, कंट्रोल बोर्ड दोष का एक मजबूत संकेतक है।
बोर्ड पावर-ऑन पर स्व-निदान चलाता है। इस अनुक्रम में विफलता एक तत्काल और लगातार अलार्म उत्पन्न करती है।
अस्थायी स्थिति त्रुटियां जो तापमान के साथ बिगड़ती हैं — अक्ष ड्राइव के ठंडा होने पर सही ढंग से प्रदर्शन करता है और गर्म होने पर खराब हो जाता है — कंट्रोल बोर्ड पर एक थर्मल रूप से संवेदनशील घटक के सेवा जीवन के अंत तक पहुंचने का सुझाव देता है।
अक्सर पूछे जाने वाले प्रश्न
Q1: एक सीएनसी अक्ष पावर-ऑन पर एक लगातार VRDY अलार्म उत्पन्न करता है। डीसी बस वोल्टेज सही है। अन्य अक्ष सामान्य हैं। क्या यह A20B-2001-0821 है?
पावर-ऑन पर एक एकल-अक्ष VRDY अलार्म, सही डीसी बस और सामान्य अन्य अक्षों के साथ, कंट्रोल बोर्ड दोष के अनुरूप है।
बोर्ड के पावर-ऑन स्व-परीक्षण में विफलता हुई है। किसी भी अलार्म कोड के लिए SVM के LED संकेतकों की जाँच करें।
एन्कोडर केबल और फीडबैक कनेक्टर को ठीक से बैठाया गया है, इसकी पुष्टि करें — एक ढीला फीडबैक कनेक्टर भी इस लक्षण का कारण बन सकता है।
यदि केबल अच्छी तरह से पुष्टि की गई है, तो कंट्रोल बोर्ड को बदलें।
Q2: अक्ष कम गति पर सही ढंग से चलता है लेकिन उच्च फ़ीड दरों पर बढ़ती स्थिति त्रुटि दिखाता है। यांत्रिक प्रणाली सामान्य दिखाई देती है। क्या यह कंट्रोल बोर्ड हो सकता है?
एक सामान्य यांत्रिक प्रणाली के साथ उच्च फ़ीड दरों पर बढ़ती स्थिति त्रुटि सर्वो नियंत्रण लूप की ओर इशारा करती है।
वेग या वर्तमान लूप पर्याप्त तेज़ी से प्रतिक्रिया नहीं दे रहा हो सकता है — यह एक संकेत है कि कंट्रोल बोर्ड के प्रसंस्करण सर्किट खराब हो गए हैं।
सर्वो मापदंडों (लूप लाभ, फ़ीडफ़ॉरवर्ड) की भी जाँच करें ताकि यह पुष्टि हो सके कि वे सही हैं।
यदि पैरामीटर सही हैं और समस्या बनी रहती है, तो कंट्रोल बोर्ड के डीएसपी या इंटरफ़ेस सर्किट संभवतः पुराने हो गए हैं।
Q3: अक्ष मोटर स्टैंडस्टिल पर असामान्य कंपन और शोर उत्पन्न करती है, लेकिन गति के दौरान स्थिति सटीकता स्वीकार्य है। कंट्रोल बोर्ड पर क्या कारण हो सकता है?
गति के दौरान स्वीकार्य सटीकता के साथ स्टैंडस्टिल पर कंपन और शोर आमतौर पर वर्तमान लूप में एक समस्या का संकेत देता है — विशेष रूप से कंट्रोल बोर्ड के वर्तमान माप या गेट ड्राइव अनुभाग में।
स्टैंडस्टिल पर वर्तमान फीडबैक में एक छोटी त्रुटि या शोर डिटरिंग करंट उत्पन्न करता है जो कंपन के रूप में प्रकट होता है।
यह प्रकार का दोष अक्सर तापमान के साथ बिगड़ता है क्योंकि घटक पुराने हो जाते हैं। कंट्रोल बोर्ड को बदलें और स्टैंडस्टिल व्यवहार की तुलना करें।
Q4: क्या रोबोट एप्लिकेशन से एक प्रतिस्थापन A20B-2001-0821 बोर्ड सीएनसी मशीन टूल में इस्तेमाल किया जा सकता है?
यदि भाग संख्या ठीक से मेल खाती है, तो हार्डवेयर संगत है।
सर्वो कंट्रोल बोर्ड सीएनसी और रोबोट दोनों अनुप्रयोगों में समान कार्य करता है — अंतर कंट्रोलर सॉफ़्टवेयर और यांत्रिक प्रणाली में है, न कि ड्राइव बोर्ड में।
सुनिश्चित करें कि -0821 प्रत्यय सहित पूर्ण भाग संख्या मेल खाती है। कभी भी किसी भिन्न प्रत्यय का प्रतिस्थापन के रूप में उपयोग न करें, भले ही बोर्ड शारीरिक रूप से समान दिखाई दे।
Q5: कंट्रोल बोर्ड बदलने के बाद, अक्ष हर चाल पर अपने लक्ष्य स्थिति को ओवरशूट करता है। पैरामीटर बैकअप से बहाल किए गए थे। संभावित कारण क्या है?
बोर्ड बदलने के बाद पैरामीटर बहाल होने पर स्थिति ओवरशूट आमतौर पर एक सर्वो लूप पैरामीटर को इंगित करता है जिसे ठीक से बहाल नहीं किया गया था।
स्थिति लाभ, वेग लाभ, या फ़ीडफ़ॉरवर्ड मुआवजा मान गलत हो सकता है।
प्रभावित अक्ष के लिए प्रत्येक सर्वो पैरामीटर की मशीन दस्तावेज़ीकरण और बैकअप मानों से तुलना करें।
यह भी पुष्टि करें कि एन्कोडर प्रकार सेटिंग सही है — गलत एन्कोडर प्रकार सेटिंग का उपयोग करने से गलत फीडबैक स्केलिंग होती है जो ओवरशूट या दोलन के रूप में प्रकट होती है।

 आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!
आपका संदेश 20-3,000 अक्षरों के बीच होना चाहिए!